基于智能巡检的配电网运维管控平台作者: 发布时间:2019-10-22
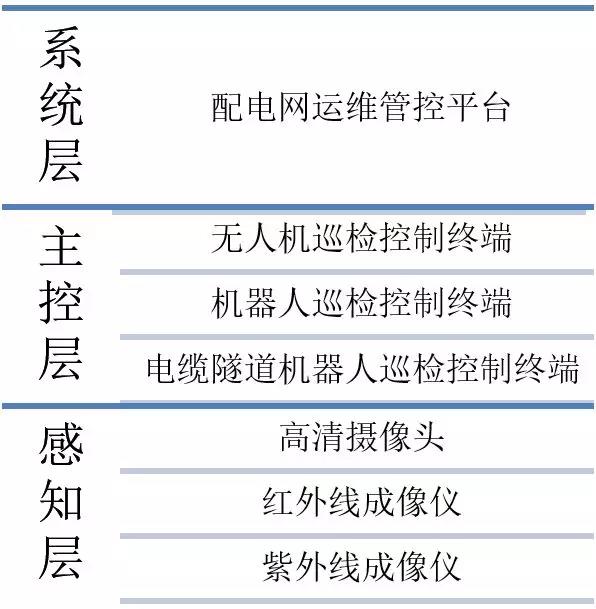
【摘 要】:根据当前各类智能巡检方式分析其优劣,结合目前部分省地市调度主站使用的D5000平台构建配电网管控平台的系统整体构架,分析各类不同智能巡检方式下配电网管控平台的通信方式及管控平台的各类功能。 【关键词】:智能巡检;管控平台;D5000平台 引言 本文从分析配电网新型巡检方式出发,针对目前配电网运维中运用到的智能巡检仪、无人机、巡检机器人等方式,提出一种基于智能巡检方式感知下的大数据配电网运维管控平台架构,可以实时远程操作各类巡检机器人,获取更全面设备运行数据,实现对设备24小时无缝隙监测,进一步加强设备状态管控能力,提升精益化管理水平。 1 配电网智能巡检方式 1.1 无人机巡检 无人机巡检在电力行业被运用在新建线路架设与投产验收、线路故障排查及大型保电作业等工作中。每年利用无人机开展的对输电线路的巡检,很大程度上弥补人工巡检的不足,克服了人工补检必须爬塔拍照才能完成的弊端,降低了人员的作业风险。当前无人机巡检系统主要包括无人机、通信基站及信息管理系统,无人机作为前端作业工具,执行检测任务并采集检测信息,通过信息管理系统对无人机作业任务和检测数据进行管理和智能处理,实现快速、准确完成线路巡检及信息采集工作。 按照结构形式的不同,可以将无人机分为无人直升机、固定翼无人机、多旋翼无人机。由于结构形式的差别,不同类型无人机在电力巡线中的应用场景以及具备的特点也存在很大差异。无人直升机巡检系统的飞行时长较长,可根据无人机系统预设的相关巡检作业路径开展相关任务巡检作业,主要适合输电线路的长航时的巡检作业;固定翼无人机系统的特点是飞行速度较快,主要适合输电线路长距离通道的可视化巡检工作,可开展采空区、断裂带等相关输电线路通道的无人机飞行巡检作业;多旋翼无人机巡检系统的稳定性很强,可以灵活操控飞行轨迹和距离,比较适合超近距离的输电线路巡检作业,主要适合输电线路的杆塔、绝缘子等金具的近距离拍摄与观察,可进行输电线路定点精益化巡检工作。 1.2 变电站巡检机器人 变电站巡检机器人是集机器人技术、远程控制技术、多传感器信息融合技术、导航定位技术、图像识别技术、红外检测技术、视频采集技术等为一体的智能机器人,具备自主充电、设备非接触检测、故障报警、远程监测等功能。 巡检机器人根据接收到的指令以自主或遥控的方式对设备进行检测,利用红外热像仪对电气设备、设备连接处和电力线路等进行红外检测,使用可见光摄像机对设备外观是否异常和线路是否悬挂异物等进行视频图像检测,利用拾音器采集运行设备声音,并通过分析声音是否异常判断设备运行状态。运行操作人员只需在监控中心通过接收到的实时红外数据、视频图像等信息进行处理分析,即可完成巡检工作。 目前变电站巡检机器人已经逐渐运用在330kV及以上高电压等级变电站中,110kV及以下电压等级变电站中也逐渐有试行。配电网中110kV及以下电压等级变电站规模较小,人工巡检劳动强度不大,但因为变电站位置较为分散,运检人员赶往每个变电站往往消耗较多时间。巡检机器人监控端位于供电公司内,机器人通过4G网络连接到互联网,借助其搭载的高清摄像头及红外成像仪,对变电站内设备进行可见光和红外热成像拍摄。 1.3 电缆隧道巡检机器人 电缆隧道巡检机器人目前主要的运动方式是导轨式,导轨式机器人相较于轮式和履带式机器人而言,最大的优点就是其运动是一维的,因此对于机器人运动方向的控制和精确定位的要求都大为简化,同时,机器人借助导轨的路线规划具有优秀的避障能力。而导轨式机器人的缺点也同样明显,即其移动路线相对固定,作为隧道巡检时检测范围受到导轨制约,因此并不适用于直径较大或检测对象分散分布的隧道环境。 电缆隧道智能巡检机器人系统主要包括:远程管理平台、管理中心平台、通信平台、供电系统、智能机器人五大部分[6],结合实时监控平台,数据采集服务器以及相关附件,可实现对电力隧道环境与设备的不间断监控。巡检机器人通过通讯系统接收远程管理平台以及本地中心管理平台的控制指令,安装在电缆隧道的智能巡检机器人通过接收遥控指令,以实现隧道实时监控与红外热成像诊断等功能,并实时的将位置、传感器等信息发回到本地中心管理平台,以获取隧道周围环境信息,本地中心管理平台的操作人员分析并规划智能巡检机器人的下一步动作。 1.4 架空线路巡检机器人 输电线路巡检机器人可长时间在线巡检,且能适应跨越大范围林区、大面积水域以及其他复杂地理环境和交叉跨越环境的线路巡检,主要对线路和附属金具的工作状况进行巡检,同时具备跨越杆塔、绝缘子、防震锤等障碍的功能。目前输电线路巡检机器人的技术发展方向包括线路清杂物机器人、线路除冰机器人、线路冲洗机器人等多个功能的巡检机器人。但输电线路巡检机器人的开发均针对330kV及以上高压输电线路,当前暂未有针对配电网低压线路巡检机器人的研发,因此本文配电网运维管控平台暂不考虑架空线路巡检机器人。 2 配电网运维管控平台 2.1 系统整体构架 配电网运维管控平台的发展目标是以配电网设备数据为核心,融合调控、巡视、检修等多方面相关信息,实现配电网运行状态的实时掌握、供电风险的识别、业务流程分析及有效的配电网在线评估,为提高配电网建设发展和运维检修提供支撑平台。 系统的整体架构由系统层、主控层、感知层三层构架组成。其中,配电网运维管控平台为系统层,实时调取和展示配电网各类监测数据,实现配电网远程监控、异常告警等功能;主控层由各类智能巡检集成控制终端构成,实现对巡检设备上传信息的处理及分析,并且负责对感知层设备的管理及通信;感知层由各类巡检平台及搭载的传感器组成,负责配电网信息的采集及上送至主控层各自巡检平台。系统结构图如图1所示。
图1 配电网运维管控平台结构图
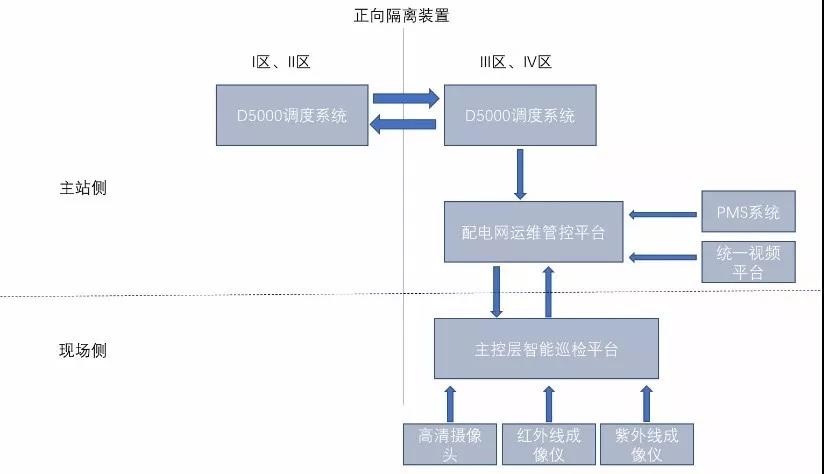
配电网运维管控平台可以依托于各地市供电公司现有D5000调度系统进行建设,实现从电网调度控制系统、变电站内各类辅助监控系统、视频监控平台等相关系统获取数据,完成全电网范围内相关运维数据的收集,利用智能巡检方式更有针对性的进行告警及异常设备的巡检。配电网运维管控平台部署于III区,系统总体构架如图2所示。
图2 配电网运维管控平台系统构架
配电网运维管控平台从D5000系统中获取变电站及输电线路实时数据,当变电站、线路设备异常发送告警信号,信息经D5000系统转发至运维管控平台,运维管控平台利用各类智能巡检设备针对异常设备实现远程巡视及检查,大大提高运检效率。 2.2 运维管控平台通信网络 目前电力系统内通信通道仍以工业以太网光纤网络为主,考虑到主控层的巡检控制终端位于变电站内,系统层的配电网运维管控平台与主控层的各类巡检控制终端可以采用光纤网络进行传输;主控层的巡检控制终端与感知层的各类巡检机器人间的通信采用短距离无线通信、3G/4G通信等方式,如远期建立起电力系统5G专网,甚至可利用5G专网进行感知层设备与主控层终端进行数据传输。 无人机、巡检机器人与控制终端的通信需实现双向传输,下行数据主要是下达的控制命令,上行数据主要包括上送巡检机器人传输的设备可见光图像、红外图像/视频、传感器监控信息以及巡检作业状态等信息。无人机、巡检机器人传输网络由无线网络、3G/4G 通信链路组成,通过无线网络或3G/4G移动通信网络将信号传输到后端,可以实现在郊区无遮挡情况下的远距离传输。 3 应用功能 3.1 实时监控 3.1.1 数据采集 无人机搭载的多传感器数据获取设备按照不同功能和航拍目的,涵盖有光学相机、红外热像仪、紫外成像仪、激光雷达等[7]。可获取的数据主要包括输电线路电力杆塔、电力线缆及电力通道走廊等光学影像的采集;输电线路中的绝缘子、电力线缆、均压环及金具等电力设备的发热状况进行热成像图的采集;输电线路中的电力线、金具等异常放电情况的检测;获取输电线路电力通道走廊及周边地物环境的点云数据,通过生成线路及电力通道走廊的三维模型,获取电力线弧垂、安全间距等信息。 变电站巡检机器人可搭载光学摄像机、红外成像仪、超声波带点监测等装置。可获取变电站内光学影像;变压器、断路器等一次设备的发热状况的热成像采集;超声波带电检测装置可获取一次设备内部局部放电数据采集。 隧道内智能巡检机器人采用运动过程中图像稳定技术和移动式红外成像技术,通过车载红外热成像仪及可见光摄像头,实现整条电力电缆隧道内关键部位(电缆接头等)光学影像采集;电缆隧道内电缆等设备的发热红外信息;电缆隧道内空气状况、温度/湿度等环境信息。 3.1.2 数据处理 采集数据源在满足合理性校验后按照人工定义的优先级发送给后续应用。应用对数据合理性检查和数据过滤功能,每个采集状态量数据可以设置合理范围,数据越过合理范围认为该数据不合理,该数据被滤除,不进入实时数据库,最后的合理值被保留在实时数据库中。通过设置告警阈值,定义数据告警范围,当实时数据库中的数据偏差超过设定的阀值,则给予告警提示处理。 根据监测装置所监测的输变电设备状态量的幅值大小或变化趋势,将设备状态分为正常、预警和告警三类。正常信息表示输变电设备状态量稳定,设备对应状态正常;预警信息表示输变电设备状态量变化趋势朝报警值方向发展,但未超过报警值。设备可能存在隐患,需加强监视;告警信息表示输变电设备状态量超过相关标准限值,或变化趋势明显。设备可能存在缺陷,并有可能发展为故障,需采取相应措施。 3.1.3 数据展示 配电网运维管控平台提供图形展示、告警、曲线显示等功能,在平台上进行一体化展示。界面功能主要包括变电设备监测、输电设备监测、装置信息、告警信息、阈值信息等。变电设备监测、输电设备监测包括变电设备及输电设备的主要监测类型,每种监测类型对应一张列表,关联相关的数据表。 3.2 查询统计 实时统计各类输变电设备的告警结果,包括日、月各监测类型预警信息数量、告警信息数量、装置告警数量。程序统计周期为5分钟,实时计算各类统计参数并将统计结果写入实时库“输变电告警统计信息表”,并且通过表格、柱状图、饼图展示告警实时统计结果。 另外实现巡视机器人清单及数量的查询,查询内容包括:装置类型、装置名称、装置ID、所属厂站、被监测设备ID等。可以按照电压等级、变电站/输电线路、装置类型等条件进行查询,显示装置清单及数量,并可以将查询结果保存成文件。 参考文献 [1] 卢嘉栋.面向电缆隧道巡检机器人的漏泄电缆分布式系统[J].电气应用,2016,35(17):44-50. [2] 郭磊,吴功平,麦晓明,彭向阳,杨智勇,周鹏.高压输电线路巡检机器人续航里程的预测方法[J].武汉大学学报(工学版),2018,51(04):347-355. [3] 刘冰,张兴永,张卫东,高盛,袁宏坤. 电缆隧道智能巡检机器人的设计与实现[J]. 电子技术与软件工程,2017(06):88. [4] 马青岷. 无人机电力巡检及三维模型重建技术研究[D].山东大学,2017. (此专文摘自《电力设备管理》杂志文库,专文主创:中国能源建设集团陕西省电力设计院 张耀东 饶菁 吴琼 于博 王钰) |